Yolo V1
paper: You Only Look Once: Unified, Real-Time Object Detection
slide:官方slide介绍,很详细
Abstract
- 如文章名字所述,其完成一次目标检测,只需要look once,也就是不像两阶段的网络那样,也不像SSD那样,需要提前生成anchor bbox/default bbox
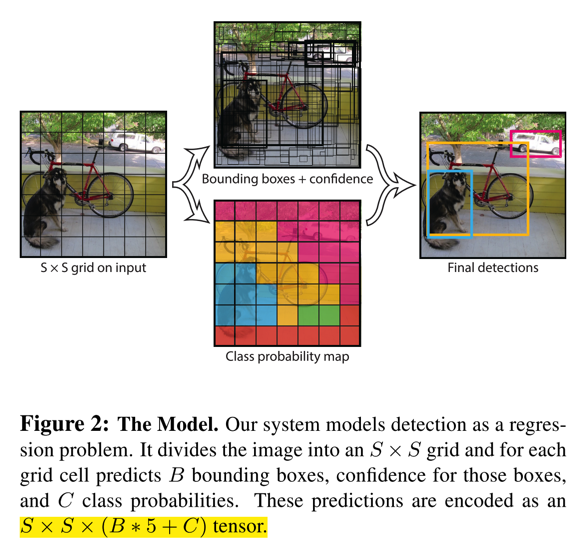
- 网络计算特别快,主要是因为需要搜索的目标框的个数不多,如文中所述,对于7x7的cell,每个cell预测2个bbox,最终的总共框的个数也就98个,相对于SSD或Faster RCNN这些,少了很多。网络的模型如下图:
Details
- 原理
- yolo v1是用CNN直接回归出目标的bbox,不需要生成anchor bbox
- 对于一张图,将其分为SxS个cell,每个cell预测B个bbox,每个bbox携带[x,y,w,h,confidence]五个信息,同时网络还预测输出该bbox属于C类的概率(对于VOC,S是7,B是2,C是20)
- 这里所说的SxS个cell,每个cell预测B个bbox,并不是对图像的真实操作,而是以网络的输出来体现的,即最后一层网络输出
7x7x(5x2+30)维的数据。- 这一点有点抽象,对于网络最后的输出,前10个为第一个cell的值,而其体现是第一个cell的方式可以这样解读:在训练计算loss时,因为是认为网络输出的坐标值是和cell编码的(见下一条阐述),所以,训练样本的label就需要映射到对应的cell中,然后再去和网络输出计算loss,这样如果输出值和映射后的label相差较大,也就是loss会大,相对于惩罚越大,接下来迭代时就会偏向于预测的值和映射后的gt更相近的地方。
- x和y是相对于每个cell编码的偏移,w和h是相对于原始图像编码的,confidence是当前cell存在目标与否的概率P与bbox和gt的IoU的乘积,即如果cell没有目标,则P=0,confidence=0,如果有目标,则P=1,confidence=IoU
- 目标概率,相对于只和有目标存在的cell有关。而且,每个cell不管预测多少个bbox,都是只预测一组C类的概率,也就是为什么每个cell的输出是
5x2+20,因为属于20个目标类别的概率是依赖于cell,而独立于bbox的
- 这里所说的SxS个cell,每个cell预测B个bbox,并不是对图像的真实操作,而是以网络的输出来体现的,即最后一层网络输出
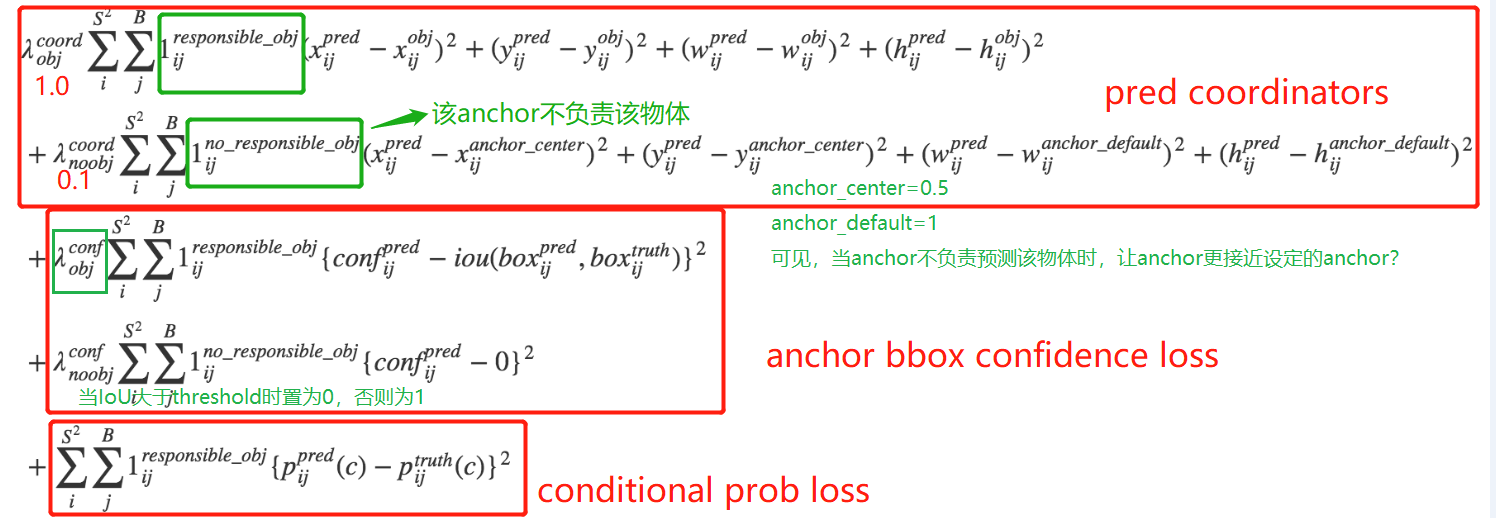
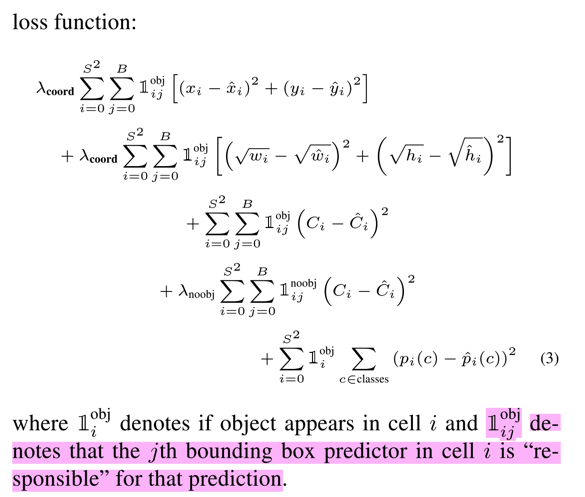
- loss函数
- 网络的loss是回归的loss和分类的loss的加权组合,由于一张图中大部分cell都是没有目标的,所以如果回归的loss和分类的loss等价的话,会导致不含有目标的cell的分类loss占据主导,不利于模型的稳定性,因此,引入两个权重因子,回归的loss权重为5,没有目标的分类的loss权重为0.5,而含有目标的cell的分类loss权重依然为1
- 同时,w和h是开方之后计算的,以消除大尺寸框和小尺寸框的差异;如果不开方,则loss会趋向于拟合大尺寸的框
- 对于回归的loss,只有该bbox属于该gt时才会计算(见loss函数的前两项)
- 对于分类的loss,只有该cell存在bbox时才会计算(见loss函数的最后一项),同时该loss是IoU和条件概率P的乘积,且不会在B个bbox上叠加,因为一个cell只预测一组置信度得分
- 如何准备数据标签?如何训练?
- 训练数据是VOC的数据格式,只是在计算loss时会做编码处理
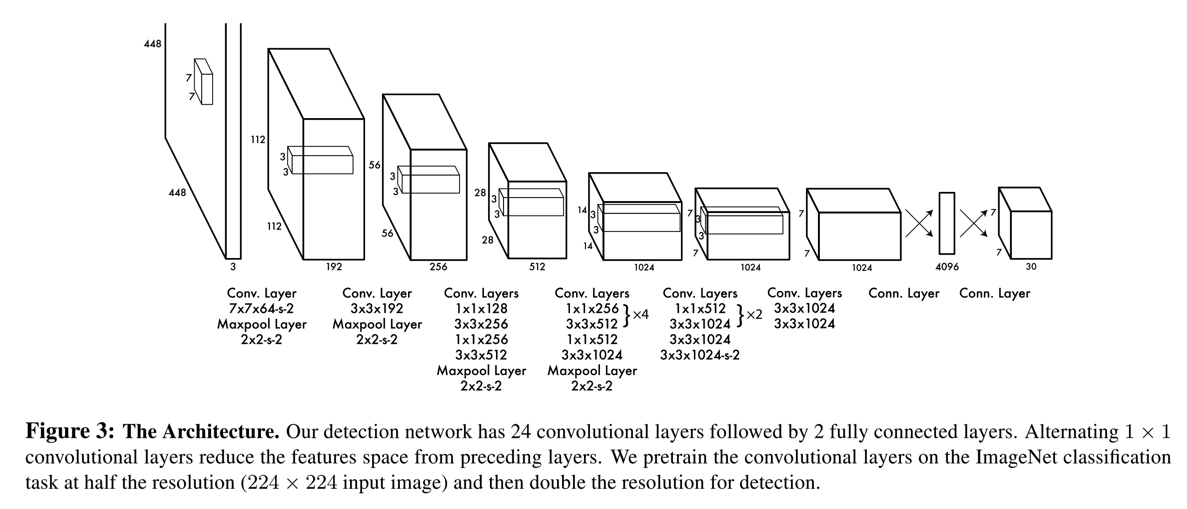
- 网络结构如下图
- 模型的backbone是GoogLeNet,首先用
224x224的尺寸在ImageNet上预训练,然后对于detection任务,double输入的分辨率,增加4个conv,2个fc,再进行finetuing
- 测试时的网络输出是什么?
- 每张图输出98个bbox,网络的最后两层是FC,然后reshape到
7x7x30,依次存储的是每个cell的[x,y,w,h,c],最后的20位是分类的概率信息 - 对于网络中,一个较大的物体,可能会被多个cell预测出来多个框的情况,用NMS过滤
- 获取第一类预测的98个bbox,如果得分小于阈值,直接将其得分置0
- 然后对所有框的得分进行排序
- 再进行nms过滤,即先取该类别置信度得分最高的bbox,然后将其他所有框与之计算IoU,IoU大于阈值,则置信度得分置0
- 对所有的类重复这个过程,这样,每个bbox的20个类别的置信度得分中,会有很多被置为0了
- 然后对每个bbox,取20个类别得分中最高的,作为其对应的预测类别
- 参见slide的36至70页
- 前向计算时,使用物体的类别预测最大值p乘以预测框的最大值c,即将类别预测值和IoU相乘,作为输出预测物体的置信度,这样能够尽可能适配到多个比例的目标,同时能够过滤到不少重叠的框(因为有IoU),见上面参考slide的第25页
- 每张图输出98个bbox,网络的最后两层是FC,然后reshape到
- 缺点?
- 对于密集的目标、小目标不好
- 对于新的长宽比的目标效果不好(SSD这些有anchor bbox,能够覆盖更多不同类型的目标)
- 与SSD的区别
- 采样方式不同:SSD是密集采样,需要预先设定多个anchor box,而yolo v1没有;SSD是用多个层的特征预测,yolo只用最后一层;SSD中每一层会设置响应的anchor的比例,yolo因为没有prior box,所以不需要设置
- 预测框的编码方式不同:SSD是center size的方式,将prior box的坐标和gt的坐标编码到一起,同时加上了variance系数,详情见SSD文章;而yolo v1的偏移是相对于cell的,宽高是相对于原图的
- loss的方式不同:SSD的loss分为分类loss(softmax loss)和回归loss(smooth l1),且只计算匹配到的prior box;yolo中分类loss和回归loss全部是l2loss,没有物体落入cell时,只计算该cell的分类loss,有物体时,计算其分类loss,两个框都会计算confidence loss,而只有IoU最大的那个才计算回归loss(即对当前cell responsible的bbox)
- 网络最后输出的方式不同:SSD是loc(
4xKxMxN)和confidence(CxKxMxN)作为两个分支分别输出,而yolo v1是融合到一起了,即最后的输出reshape到30(5x2+20)个SxS的FM,对于每个位置,包括两个框的坐标和confidence,同时包括该cell的conditional class probabilities
Yolo V2
paper: YOLO9000: Better, faster, stronger
Abstract
- YOLO9000是在yolo的基础上引入BN, anchor box, passthrough, high resolution classifier/detector, multi-scale等改变来提升目标检测的性能的,构造的模型为Darknet-19,共有19个卷积层。
- 如论文名字所示,改变主要有三点Better/faster/stronger,其中前两者主要的改变在网络结构和训练技巧上。
Details
网络结构
- 增加BN层: Better
- yolov2中,在每一个conv后面都添加BN层,mAP提升了2%(加入BN后,将v1中的dropout移除了)
- High resolution classifier: Better
- v2中直接先将分类网络在
448x448的分辨率上训练,然后再放到detection任务上微调(v1中,先在224x224的图像上训练,再在448x448的图像上微调)
- v2中直接先将分类网络在
- Multi-scale train: Better
- v2在训练中尝试使用不同大小的图像进行训练,以cover更多不同scale的图像输入。(因为v2中移除了fc层,所以可以对输入图像进行resize)
- yolov2的网络最后的图像缩放比例是32,作者选择的图像尺寸范围为320到608之间。在训练时,每隔10个batch,随机选择一个新的图像尺寸
- Fine-grained feature: Better
- 类似于residual connection的方式,yolo v2将最后输出的fm的前面更高分辨率的特征图加入进来以增加网络特征的尺度(网络输出是
13x13,将前面26x26的fm结合过来) - 但是其实现方式不同,这里是一个reorganization层,是一个根据stride进行采样的方式,即将一个大的feature map变成小的feature map,如参考yolov2 解读
- 类似于residual connection的方式,yolo v2将最后输出的fm的前面更高分辨率的特征图加入进来以增加网络特征的尺度(网络输出是
- Convolution with anchor box: Better
- 由于v1每次只预测98个bbox,当图像中物体相对较密集、物体的形状不同于常见形状等场景中效果不佳,因此v2把anchor box也引入进来了
- 为了使用anchor box,作者将网络做了如下的改变:
- 移除fc层,全部替换为conv层
- 移除一个pooling层,将网络最后的预测大小能够在更高的分辨率上
- 将输入图像从
448x448缩小为416x416,以保证最后的feature map只有一个奇数中心点(因为网络是缩小32倍,前者最后的特征图是14x14,后者是13x13)
- 不同于Faster Rcnn中对anchor box的使用方式,yolo v2依旧使用v1中对框的预测方式,将类型预测和位置回归解耦合,而不是对每个anchor box去预测其对应的的class和bbox
- YoloV2中的anchor box
- 如v1,v2将fm分成
MxM的cell,每个cell也预测B个bbox(v2中是13x13的cell,每个cell预测5个不同aspect ratio的bbox) - 每个bbox包含4个坐标值(xywh,xy是相对于每个cell的,wh是相对于anchor box的w和h,也就是作者说的Directly location prediction),1个confidence score(该cell包含物体的概率),20个类别得分。而一个cell预测5个bbox,因此输出维度为\((4+1+20) \times 5 \) = 125.
- anchor如何打标签的呢?
- 得到物体的bbox的中心点,将这个中心点所落在的cell中的5个anchor box,与这个物体的bbox计算IoU,最大的anchor用于预测该物体(v1中每个cell只预测一组类别得分,即每个cell只负责预测一个物体)
- anchor的选择
- 不同于其他anchor的方法,yolov2中anchor是通过聚类的方式设计出一组anchor的,比例为
// 宽和高,作者文中阐述了,选择的anchor多是高瘦的bbox [0.57273, 0.677385], [1.87446, 2.06253], [3.33843, 5.47434], [7.88282, 3.52778], [9.77052, 9.16828]. - 在聚类时,没有使用传统的欧氏距离loss,而是用的IoU loss
- 不同于其他anchor的方法,yolov2中anchor是通过聚类的方式设计出一组anchor的,比例为
-
预测的过程:假设网络输出的预测结果是\( (t_x, t_y, t_w, t_h, t_o) \), 每个cell相对于图像左上角的距离为\( (c_x, c_y) \),anchor box(paper中的prior box)的宽高为\( p_w, p_h \),则实际对应的结果为: \[ d_x = \sigma(t_x) + c_x \] \[ d_y = \sigma(t_y) + c_y, \] \[ d_w = p{_w}e^{t_w}, \] \[ d_h = p{_h}e^{t_h}, \] \[ P(object) * IoU(b, object) = t_o \]
- 其中,\( \sigma \)代表sigmoid函数,为了将某些结果压缩到0到1之间
- 预测框的中心点\( d_x, d_y \),压缩到0到1之间,加上对应的cell的中心点,宽和高\( d_w, d_y \),其中e相当于缩放因子再乘以anchor的宽高
- 除此之外,box的置信度和box的类别概率也是在0到1之间
- 得到的\( d_x, d_y, d_w, d_h \)是相对于cell的,因此还需要再乘以缩放倍数32,才能得到在原图上的目标的框
- 如作者文中所述,引入anchor,yolov2的mAP从69.5降低到了69.2,但是recall从81%提升到了88%
- 如v1,v2将fm分成
- Loss
- loss较为复杂,且论文中并没有给出,下面的loss附图,来源于yolov2 解读2
- loss较为复杂,且论文中并没有给出,下面的loss附图,来源于yolov2 解读2
- Yolov2的网络结构见yolov2 网络结构
- Darknet19,总计19个卷积层,5个maxpooling层,当用于detection时,移除最后一个conv,加上三个1024个3x3kernel的conv,最后再加一个125个1x1kernel的conv(加上linear activation);同时,加入前面讲的reorg层
- 可见,最后的输出是$13x13x125$,其中125便是代表每个cell预测5个bbox,每个bbox有4个coord、1个confidence、20个目标类别(不包含背景的)
- 本文中还引入一个利用层级分类方法实现的更强的YOLO9000,这里不做详细阐述了