paper: Objects as Points
code: https://github.com/xingyizhou/CenterNet
Abstract
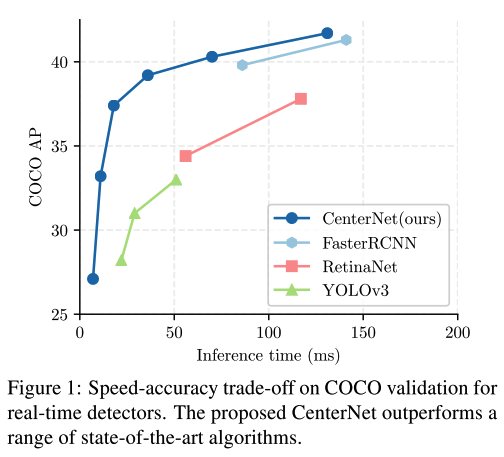
- CenterNet是anchor-free的目标检测方法,用预测出的点表示一个object,同时回归出目标的size和offset。其性能表现如下:
- CenterNet与one-stage和two-stage的detector的区别
- 只预测目标的中心点,不需要设计anchor,也就无需构造positive samples和negative samples,耗时少且易于训练;
- 不再需要NMS操作(这一点其实有些场景还是需要的,后续讲到)
- CenterNet的主要建模思想 CenterNet的主要建模思想,可以参考如下公式和图示:

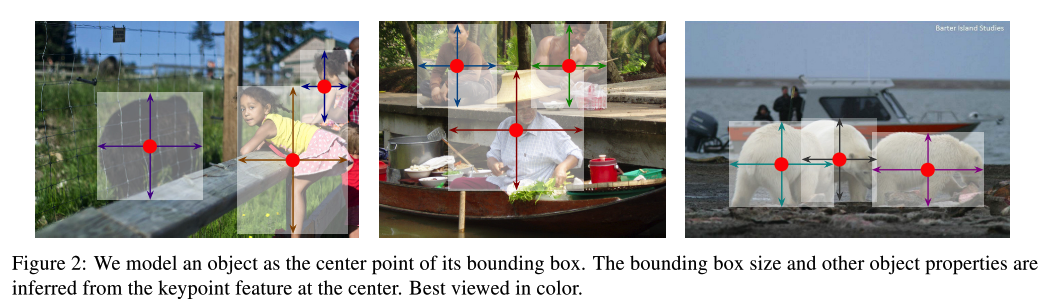
即对于一张输入的图像,CenterNet希望能够学到一个缩小R倍的heatmap,heatmap中每一个点的值若为1,则表示当前点检测到了类别为c的目标,为0则表示该点为背景;该方法,用目标框的中心点表示一个object,然后给出该object的size以及映射回原始图像的offset。
Details
- 训练时如何生成对应的heatmap
- 对原始图像中一个单独的gt中心点,映射到缩小R倍的特征图上,这里是向下取整;
- 用高斯核将所有gt中心点构造在一个原始图像缩小R倍的heatmap上
- 用公式表示如下:
- 9x9的效果图如下(附图来源参考链接1):
- 实际是实现时的heatmap细节
- 在设计heatmap的标签时,为了能够尽可能保留多一些bbox,作者将那些中心点在gt的中心点的一定范围内且IoU大于一定比例的框也保留下来了
- 根据每个object的bbox的center点得到一个radius,然后用radius设计高斯核,生成整体的heatmap
- 在计算radius时,考虑了多种情况,参考这里的阐述gt map计算高斯核,代码对应于
CenterNet/src/lib/utils/image.py,如下def gaussian_radius(det_size, min_overlap=0.7): height, width = det_size a1 = 1 b1 = (height + width) c1 = width * height * (1 - min_overlap) / (1 + min_overlap) sq1 = np.sqrt(b1 ** 2 - 4 * a1 * c1) r1 = (b1 + sq1) / 2 a2 = 4 b2 = 2 * (height + width) c2 = (1 - min_overlap) * width * height sq2 = np.sqrt(b2 ** 2 - 4 * a2 * c2) r2 = (b2 + sq2) / 2 a3 = 4 * min_overlap b3 = -2 * min_overlap * (height + width) c3 = (min_overlap - 1) * width * height sq3 = np.sqrt(b3 ** 2 - 4 * a3 * c3) r3 = (b3 + sq3) / 2 return min(r1, r2, r3) def gaussian2D(shape, sigma=1): m, n = [(ss - 1.) / 2. for ss in shape] y, x = np.ogrid[-m:m+1,-n:n+1] h = np.exp(-(x * x + y * y) / (2 * sigma * sigma)) h[h < np.finfo(h.dtype).eps * h.max()] = 0 return h
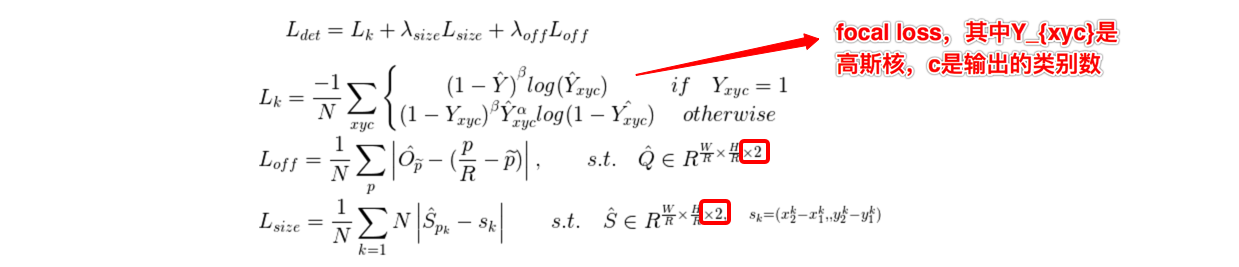
- Loss function
- loss由三部分组成,heatmap中中心点相关的loss(focal loss),目标size相关的loss(L1 loss),以及目标offset相关的loss(L1 loss),如下图:
- loss由三部分组成,heatmap中中心点相关的loss(focal loss),目标size相关的loss(L1 loss),以及目标offset相关的loss(L1 loss),如下图:
- 如何将bbox转换为point?
- 这一点和loss function中的size相关的的s_k的取值方式相似,即给定object的bbox是(x1,y1,x2,y2),则其中心点是((x1+x2)/2, (y1+y2)/2)
- 这样的话,训练时对于数据只需要按照coco的方式处理好即可,不需要自己单独取整理计算出中心点作为输入
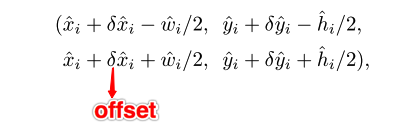
- 如何将point转为bbox?
- 对于网络inference阶段的结果,对每个类别的heatmap,取每个8邻域中的最大值,保留topK个(文中为100,不同任务可以调整),然后利用如下公式将点映射为bbox(如果需要映射回原图,还需要在下面公式的基础上乘以缩放系数R):
- 所有的输出都是直接用关键点预测的,不需要基于IoU的NMS操作
- 对于网络inference阶段的结果,对每个类别的heatmap,取每个8邻域中的最大值,保留topK个(文中为100,不同任务可以调整),然后利用如下公式将点映射为bbox(如果需要映射回原图,还需要在下面公式的基础上乘以缩放系数R):
- 不足之处
- 毫无疑问,CenterNet能够减少anchor所需要的计算耗时,但同时其也有不足,即假如两个目标的中心点很靠近的话,会导致其中一个目标被忽略掉,因为在选取中心点时,是取8邻域的最大值,如此便把很靠近最大值的次大值忽略掉了
- 源码解读
- 暂时没详细的跟读源码